Authors
Virginia Espinosa-Duró, Jiří Mekyska and Marcos Faundez-Zanuy
Access to the database
Please fill in a license agreement that can be downloaded in DOCX or PDF and send it to espinosa@tecnocampus.cat with CC to faundez@tecnocampus.cat and mekyska@feec.vutbr.cz. You will consequently get an access to the database.
Publications to be cited
R. Benes, P. Dvorak, M. Faundez-Zanuy, V. Espinosa-Duró and J. Mekyska, „Multi-focus thermal image fusion“, Pattern Recognition Letters, vol. 34, no. 5, pp. 536–544, 2013.
M. Faundez-Zanuy, J. Mekyska and V. Espinosa-Duró, „On the focusing of thermal images“, Pattern Recognition Letters, vol. 32, no. 11, pp. 1548–1557, 2011.
Terms of use
This database is freely available. In case of any publications based on this database please cite the papers mentioned above.
Description
The database was acquired using a thermographic camera TESTO 882-3 equipped with an uncooled detector and a spectral sensitivity range from 8 to 14 μm. It has a removable German optic lens with these main features:
- image resolution: 320 × 240 px,
- spectral sensitivity: 8 to 14 μm,
- thermal sensitivity (NETD)<0.06 °C at 30 °C,
- geometric resolution (IFOV): 1.7 mrad,
- detector type: silicon microbolometer uncooled, temperature stabilized,
- FOV: 32° × 23°; focal distance: 15 mm; fixed aperture: f/0.95.

The database consists of six image sets. In each set, the camera acquires one image of the scene at each lens position. In our case we have manually moved the lens in 1 mm steps, which provides a total of 96 positions. Thus, each set consists of 96 different images of the one scene. For this purpose, we have attached a millimeter tape to the objective. We also used a stable tripod in order to acquire the same scene for each scene position and a dimmer to fix the bulb current.
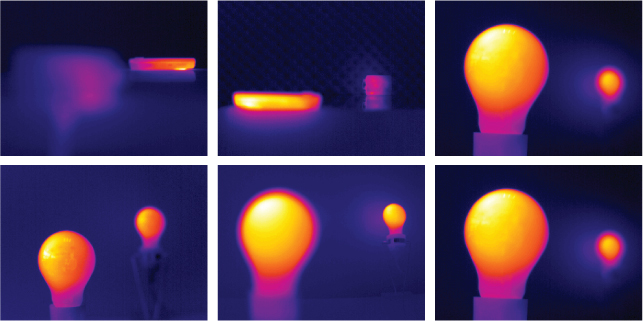
We have acquired six image sets:
- Image set 1: scene is made up of mobile phone and RS-232 interface in different distances and homogenous heat absorbing background. Distance between camera and the first object is 35 cm and its temperature is 41.2 °C. The distance between objects is 40 cm for all images sets. The maximum temperature of the second object is 32.9 °C.
- Image set 2: scene is made up of mobile phone and RS-232 interface in different distances and homogenous heat absorbing background. Distance between camera and the first object is only 15 cm and its temperature is 39.4 °C. The maximum temperature of the second object is 55.9 °C.
- Image set 3: scene is made up of two bulbs in different distances and non-homogenous background (partially black and partially white). The bulbs are acquired with a view to the holders. Distance between camera and the first object is 30 cm as in all bulb image sets. The temperature of 1st bulb is 51.7 °C and 2nd is 50.4 °C.
- Image set 4: scene is made up of two bulbs in different distances and homogenous white background. The bulbs are acquired with a view to the holders. The temperature of the first bulb is 43.3 °C and 2nd is 41.3 °C.
- Image set 5: scene is made up of two bulbs in different distances and homogenous white background. The bulbs are acquired without a view to the holders. The temperature of the first bulb is 57.0 °C and 2nd is 53.6 °C.
- Image set 6: scene is made up of two bulbs in different distances and homogenous heat absorbing black background. The bulbs are acquired with a view to the holders. The temperature of the first bulb is 57.9 °C and 2nd is 54.7 °C.
The reference images, where both objects are sharp, were created very easily using this command in MATLAB: img = [img1(:,1:thr) img2(:,thr+1:end)]; where img1 and img2 is the image with a perfectly sharp object 1 and 2 respectively. Variable thr determines the border between these two objects.